5 проблем, из-за которых беспилотные автомобили еще не стали повседневной нормой
Человеческий мозг способен принимать творческие решения в экстремальных обстоятельствах значительно быстрее и лучше любого компьютера. Реакция на перебегающего дорогу ребёнка или падающее поперёк полосы дерево для человека однозначна, а вот для робота — нет.
Мы собрали небольшой рейтинг ситуаций, в которых робомобиль может натворить бед. Впрочем, это только пока — инженеры работают над этим.

Непредсказуемые действия людей — пешеходов и других водителей
Алгоритмы беспилотного автомобиля заставляют его идеально соблюдать правила дорожного движения — показывать повороты, следовать знакам и так далее. Но технология неспособна контролировать поведение других водителей. Роботам придётся иметь дело с теми, кто превышает скорость, ездит на красный и так далее.
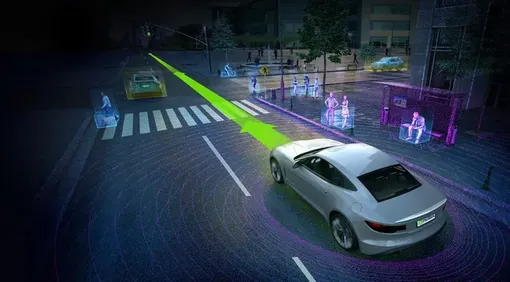
Основное решение этой проблемы лежит в оснащении робомобилей датчиками, фиксирующими их динамическое положение относительно окружающих объектов и в особенности — движущихся автомобилей (так называемая технология ehicle-to-vehicle или V2V). Правда, для того, чтобы она работала, ей должны быть оснащены все участники движения, в том числе и пилотируемые.

Погодные условия
Снег, дождь и так далее трудны не только для людей. Например, снег будет мешать роботу считывать полосы движения, а «инстинктивного» следования полосе у робота нет. Аналогично падающий дождь и снег могут серьёзно мешать лазерным сенсорам считывать окружающую обстановку. По утверждениям Google, именно погодные условия — это первая причина аварий и провалов беспилотных автомобилей. Иначе говоря, в плохую погоду лучше брать управление в свои руки.
Решение этой проблемы — увеличение количество датчиков и их совершенствование. Например, ориентирование не по полосам, а по обочинам или ряду деревьев вдоль дороге, если полосы завалены снегом. Эту технологию сегодня разрабатывает Mercrdes-Benz.

Проблемы навигации и ремонта дорог
«Гугломобиль» ориентируется по значительно более детализированной, чем обычный Google Maps, картам — в них включены дорожные знаки, временные ограждения и дорожные ямы. Беспилотный автомобиль компилирует такие карты с тем, что реально «видит» вокруг себя.
Но на таком уровне можно детализировать очень немногие дороги. Представьте себе, например, подобное исследование сельской дороги в глубинке России. Плюс реконструкции, ремонты и видоизменения дорог происходят ежечасно — вчерашний перекрёсток сегодня может стать прямым участком.
Решение лежит в области оснащения картографическим оборудованием обычных автомобилей, чтобы актуальная информация считывалась с них и подавалась на карту для беспилотных. Такие технологии сегодня развивают BMW, Mercedes-Benz, Audi.

Ямы, просто ямы
Безусловно, у робомобилей есть радар, лазерные датчики и камеры высокого разрешения. Но они «заточены» в первую очередь на объекты, лежащие на уровнем дорожного полотна, а ямы, лежащие ниже, находятся за гранью понимания машины. Тёмное пятно на дороге может быть ямой. Или масляной лужей. Или рисунком. Например, робомобиль может в панике затормозить перед тёмным пятном, которое на самом деле окажется тенью от какого-то объекта.
Решение — опять же, в увеличении количества и развитии качества датчиков, в частности — лидаров. Лидар не перепутает яму с тенью, поскольку основан на световом принципе восприятия информации. Другой вариант — «умная» дорога, которая будет предупреждать автомобиль о своих недостатках.
Этическая проблема
Представьте себе, что на дорогу вылетает мячик, а за ним выбегают двое детей. И у робота есть дилемма: сбить детей или свернуть и врезаться в телефонный столб, что, скорее всего, убьёт пассажиров. Кого убить — пешеходов или водителя?
Над этим вопросом инженеры бьются не первый год. Живой водитель мгновенно оценивает риски и находит оптимальное решение, понимая последствия в той или иной ситуации, исходя из понимания не только дорожной, но и моральной, и юридической ситуации. А робот тупо выбирает: кого давить, и этот выбор будет прописан инженерами априори.
И решения у этой проблемы пока нет.