Монокоптер: как устроен вертолет с одной лопастью
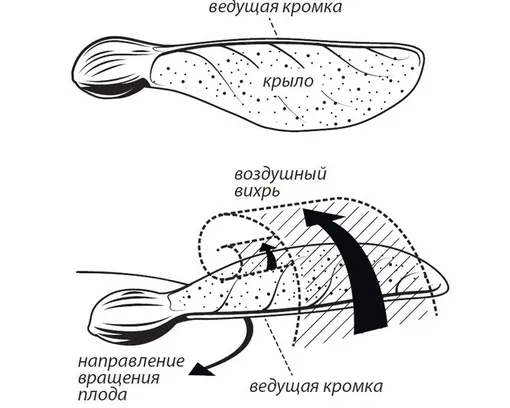
Многие из нас в детстве запускали кленовые крылатки с балкона. Вместо того чтобы падать вертикально вниз, такой плод планирует, быстро вращаясь, точно вертолетный винт. Этот эффект основан на удлиненном сухом околоплоднике, аэродинамические свойства которого сходны со свойствами лопасти пропеллера. Конечно, глядя на крылатку, человек не мог не подумать: надо применить этот принцип в механике!

Правда, практика показала — что хорошо для природы, то совершенно не обязательно хорошо для рукотворной техники. Так или иначе, 14 января 1910 года французские инженеры Альфонс Папен и Дидье Руилли представили перед Французской академией наук проект летательного аппарата, формой и принципом действия напоминавшего крылатку белого клена. На заре авиастроения интерес к оригинальным проектам был весьма велик, поскольку предсказать, какой из многочисленных воздухоплавательных принципов «сработает», было довольно трудно. В итоге уже годом позже Папен и Руилли получили финансирование от военных, поскольку армия всегда первой подхватывала перспективные проекты, — и принялись за дело.
Траектория куколки
Природная задача крылатки достаточно проста. Замедление падения и сложность траектории позволяют семени-вертолету улетать значительно дальше от материнского дерева, нежели, например, желудю или каштану. Зачем это нужно в технике? Ведь стабилизировать траекторию полета монокоптера невероятно трудно, поскольку лопастью в нем служит весь корпус. Плюс ко всему, если монокоптер несет на себе человека, необходимо каким-то образом обеспечить неподвижность кабины и достаточную стабильность аппарата при нахождении в воздухе. В общем, задача кажется нетривиальной, значительно более сложной, нежели в случае с вертолетом обычной схемы.

Тем не менее неоспоримые плюсы у монокоптеров есть. Во-первых, они, подобно автожирам, не упадут на землю при отказе двигателя, а спланируют на авторотации. Во-вторых, монокоптер состоит из очень небольшого количества элементов, причем подвижных среди них — раз, два и обчелся, и потому его надежность весьма высока; даже столкновение с другим летательным аппаратом и легкие повреждения, нанесенные корпусу-крылу, позволят монокоптеру пролететь еще некоторое расстояние, например, до базы. На последнее преимущество и купились французские военные.
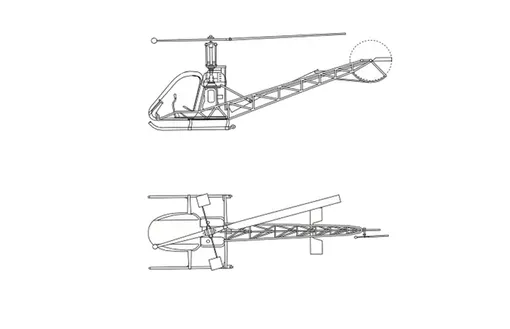
Творение Папена и Руилли получило название Chrysalide («Куколка»), а сам класс аппаратов, защищенный двумя европейскими и одним американским патентами, — Gyroptere (гироптер). Странный вертолет имел одну огромную полую лопасть длиной 17 м и по конфигурации был практически один в один скопирован с кленовой крылатки. Лопасть располагалась с одной стороны от кабины пилота, с другой она уравновешивалась силовым агрегатом, 9-цилиндровым ротативным двигателем Rhone мощностью 80 л.с. — для того времени очень немало.
")
Собственно, кроме звездообразного ротативного двигателя, другого варианта не было: в таком агрегате цилиндры вместе с картером вращаются вокруг неподвижного коленчатого вала. Rhone «выдавал» 1200 об/мин и вращал вентилятор, нагнетавший внутрь лопасти воздух. Из выгнутого конца лопасти струя выходила со скоростью порядка 100 м/с, приводя весь аппарат во вращение. Пилот «Куколки» располагался в центре масс между крылом и вентилятором — это позволяло стабилизировать его положение. Направление полета задавалось воздушной струей: часть нагнетаемого воздуха отводилась в поворотный воздухопровод, соединенный с рулем.
Так или иначе, к 1913 году «Куколку» построили, хотя проблем оказалось множество: в частности, технологии того времени не позволяли обеспечить достаточную прочность конструкции, да и положение пилота оказалось не столь стабильным, как следовало из расчетов. Плюс ко всему началась Первая мировая война, и полевые испытания сумели провести лишь 31 марта 1915 года на небольшом озере в департаменте Кот д’Ор.
Вдобавок ко всему прочему оказалось, что мощности мотора катастрофически не хватает — монокоптер вращался с частотой всего 47 об/мин, хотя по расчетам для взлета требовалось как минимум 60 об/мин. Закончилось испытание печально: пилота начало закручивать и трясти, он сумел каким-то образом спрыгнуть в воду, после чего «Куколка» заглохла, перевернулась — и затонула, несмотря на то что ее основанием был полый поплавок.
")
К несчастью, при испытаниях присутствовала военная комиссия, то есть представители «спонсора». Средства были отозваны, а разработку рекомендовали прекратить. В военное время стране было не до экзотики, Папен и Руилли трудились на благо отечества в совершенно других областях. Впрочем, «Куколку» инженеры из озера подняли, а в 1917 году представили новый проект облегченного гироптера — правда, денег на его создание правительство уже не выделило. Поиски финансирования незадачливые изобретатели продолжали аж до 1936 года.
Кому нужен монокоптер?
Но даже если бы на «Куколку» был установлен более мощный двигатель (как и планировалось изначально), даже если бы она взлетела — вряд ли монокоптеры нашли бы свою нишу в мировом авиастроении. Авиационный бум 1910-х годов позволил прогрессу идти семимильными шагами: уже к концу Первой мировой войны армии всех воюющих государств были оснащены самолетами, достаточно совершенными и скоростными, чтобы творение Папена и Руилли осталось лишь историческим курьезом.
Казалось, возвращаться к схеме крылатки нет никакого смысла. Слишком громоздкая и сложная конструкция с невысокой грузоподъемностью может служить разве что для наблюдения, но сегодня эту функцию повсеместно выполняют дроны... Стоп! Дроны? А это идея!
Действительно, если полноразмерный монокоптер, обязанный выдерживать человека, оказывается чрезмерно неудобным и ненадежным, то для крошечного дрона-наблюдателя подобная схема кажется чуть ли не оптимальной. Если сравнять размеры робота с размерами прототипа — кленового плода, то окажется, что у беспилотных монокоптеров очень неплохое будущее. В 2006 году, спустя почти век после французов, об этом задумались специалисты компании Lockheed Martin.

Маленькие машинки
Конечно, во всем замешано агентство DARPA — кто же еще! 10 июля 2006 года было объявлено, что Lockheed Martin получили неплохой грант на разработку монокоптера в рамках программы nano air vehicle (NAV). Итоговая конструкция по техзаданию должна весить не более 20 г и иметь не более 15 см по максимальному размеру; кроме того, заказчики из DARPA указали и минимальную скорость наноразведчика — 36 км/ч, что кажется откровенно фантастическим. Изначальный прототип, рассчитанный на компьютере, действительно имел размеры кленовой крылатки — 5-сантиметровая лопасть и крошечный реактивный двигатель, вращающий устройство с частотой порядка 15 000 об/мин. Плюс, конечно, оборудование: сенсоры, камеры, коммуникационное устройство, и все это каким-то чудесным образом вмещается в систему, суммарная масса которой составляет всего 10 г.

Но время шло, а сделать расчетную конструкцию в пластике не получалось. В итоге монокоптер Lockheed Martin проиграл конкуренту — устройству под названием Nano Hummingbird (то есть «колибрилету»), созданному в рамках того же заказа компанией AeroVironment. 19-граммовая законченная модель махолета, «срисованного» с колибри, была представлена зимой 2011 года, в то время как монокоптер до сих пор находится в разработке. На сегодняшней стадии длина его лопасти достигла 17 см; правда, на выставках чаще всего демонстрировался более крупный экземпляр с 40,6-сантиметровым крылом; на нем тестируется и система управления.
Впервые дрон от Lockheed Martin, получивший в итоге название Samarai, был показан в августе 2011 года на выставке AUVSI (Международной ассоциации конструкторов беспилотников). Запросы DARPA пока что остались невыполненными: в придачу к чрезмерной длине дрон еще и весит 227 г, хотя камеру держит вполне исправно. Реактивный двигатель в итоге заменили электрическим — с пропеллером, расположенным на законцовке лопасти.
Но пока Lockheed Martin бьется над непростой задачей, троица независимых инженеров из Мэрилендского университета построила свой дрон-монокоптер The Ulrich Flyer (или иначе — Robotic Samara, окончательного названия еще нет). Точнее, целых три дрона, последний из которых имеет всего лишь 7,5-сантиметровое крыло, — кажется, у ребят из Lockheed Martin серьезные проблемы в плане конкуренции. Надо сказать, Ульрих и компания работали над монокоптером тоже достаточно давно, с 2007 года. Принцип работы The Ulrich Flyer такой же, как и у Lockheed Martin Samarai, то есть имеется крыло в форме крылатки и импеллер на его законцовке. Вот только у мэрилендцев получилось (почти — по крайней мере по размерам) вложиться в технические требования заказчика.

Дроны-наблюдатели, сделанные по схеме монокоптера, хороши тем, что в них практически нечему ломаться. Кроме крошечного электродвигателя с пропеллером, в них нет ничего подвижного. Правда, до сих пор стоит проблема стабильного управления монокоптерами — но если DARPA и впредь будет выделять миллионы долларов на подобные разработки, нет сомнений, что ученые преодолеют все барьеры.
Беспилотникам — дорогу!
Сегодня ничто не указывает на какие-либо перспективы для пилотируемых монокоптеров. Попытка Папена и Руилли была очень неплоха для 1910-х — но, видимо, навсегда отбила у инвесторов желание вкладывать средства в подобные проекты. Тестовый вертолет Bolkow Bo-103 был создан в 1960 году только для тестирования стеклопластикового профиля лопасти — никак не для серии. А вот беспилотники имеют все шансы серьезно обосноваться на современном рынке военных дронов-наблюдателей.
Дроны-монокоптеры всегда казались интересной концепцией. Известен ряд разработок Чарльза Маккатчена, строившего подобные модели в 1950-х; впоследствии монокоптеры строили моделисты из СССР, Румынии, США, в 1988 году моделист Кори Клайн первым сконструировал монокоптер с ракетным двигателем. Сегодня есть целый ряд моделистов, создающих копии монокоптеров Маккатчена (McCutchen Machines) и свои собственные системы, а профессор Кентского университета (Огайо) даже выпустил по подобным моделям монографию.

При должной компактности к монокоптеру можно смело прикрепить даже очень дорогое оборудование (камеры, датчики), поскольку он не может упасть даже при отказе двигателя, да и вообще теоретическая надежность монокоптера весьма высока. Создатели Robotic Samara приводят и еще один аргумент в пользу дронов-наблюдателей однолопастной конфигурации: подобный робот вращается несколько сотен раз в минуту, каждый раз фиксируя панорамную картинку и, таким образом, собирая максимально возможную информацию об окружающей обстановке. Обычному дрону для получения такого же объема нужно разворачиваться, заходить на виражи и т. д. Правда, остается решить вопрос стабилизации, но при современном уровне технологий все возможно. И самое интересное, что шансы со-здать работающий и управляемый дрон-монокоптер у любителя-моделиста и серьезной организации вроде Lockheed Martin примерно равны. Особенно если DARPA выделит на это необходимые средства.